歩きながら3次元点群を作る強力なSLAM LiDARスキャナ

本製品は製造終了となりました。今後は在庫分のみの販売となります。詳細はお問い
合わせください。
本製品の後継機種はOrbisとなります。
最強のSLAM技術のハンディータイプのLiDARスキャナです。GPSを使用しないため、屋内・屋外・地下で使うことができます!
1秒に30万点をスキャンし、専用のソフトウエアでデータを確認し、ワンクリックでlas・laz等のフォーマットにエクスポート可能です。
- カテゴリ
- ドローンマッピング3Dマッピング
- 業界
- 土木 測量 防災
- メーカー
- GeoSLAM
GPSを使用しないSLAMベースLiDARスキャナZEB Horizon
本製品は製造終了となりました。
今後は在庫分のみの販売となります。
詳細はお問い合わせください。
本製品の後継機種はOrbisとなります。
LiDARは、(Light Detection and Rangingの略で)パルスレーザー(光)を使用して距離を測定するリモートセンシング技術です。
これらの光パルスは周りの空間をスキャンし、正確な3次元情報 – 3次元点群 – を生成するために使います。
ZEB-HORIZONは、最新のSLAM技術を活用したLiDAR搭載のモバイル式3Dレーザースキャナーです。
簡単に特長を伝えるならば、「丈夫で軽量、使いやすくて、キャプチャが速く、処理が簡単」です。手に持って歩くだけでスキャンが完了します。
GPSを必要とせず、自分自身で自己位置推定を行い、短期間で尚且つ正確な3次元点群データを収集可能。
| 最大測定距離 | スキャンポイント/秒 | 相対精度 | スキャンFOV | センサーの数 |
|---|---|---|---|---|
| 100m | 300,000点 | 6mmまで | 360° x 270° | 16個 |
どこでも使えるLiDAR
工場や施設、ビルの点検・管理から、鉱山での地形調査、森林調査、遺跡調査、金属精錬所でのスラグ体積計算など、活躍は多岐にわたります。
軽量でコンパクトなモバイルの利点を生かして、人の手が届きにくい場所や立入りが困難な危険な場所(マンホールや天井空間など)でも、別売の延長可能なポールやクレードルを取り付けて使用ができます。
ある排水処理施設では、毎年増設されるパイプの管理に、その都度2次元の図面を作成していたのですが、ZEB Horizonを使用した3Dデータを活用することで、煩雑な図面作成・管理が簡素化できることが立証された事例もあります。
本体が軽量でコンパクトなZEB Horizonは、手持ちで使用することはもちろん、背負ったり、ぶら下げたり、ドローン(Matrice 300)に搭載したり、自動車にマウントしたり、屋内、屋外を問わず様々な場所で、ボタン一つでいつでもどこでも使用することができます。

ドローン用(UAV)取り付け

クレードル取り付け

車用取り付け
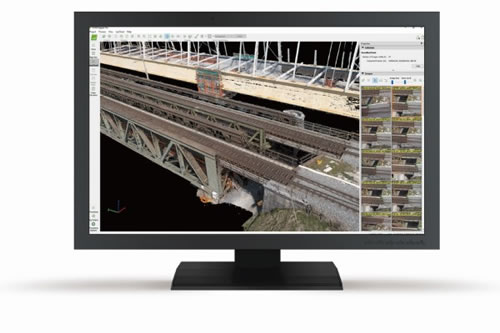
3Dデータの処理
付属するソフトウェアGeoSLAM Connectでは、データの3D視覚化、フィルタリング(外れ値の除去など)、ワークフロー自動化ツール、サードパーティ製ソフトウェアアプリケーションへの統合ができます。
ボタンを 1 つ押すだけで、データは自動的に処理され、任意のフォルダーに保存され、ワークフローの次のステップに備えられます。
ZEB-VISIONを使用することで、ワークフローの中でRGBカラー化も簡単にできます。
GeoSLAMのデータは、ユニバーサル ファイル形式(LAZ/LAS/PLY/TXT/e57)で動作するソフトウェアと互換性があります。
サンプルデータ
ZEB Horizonのアクセサリー・アップグレード
Zeb Vision

ZEB Horizonに4K解像度の360度パノラマカメラ
を接続した組合せで、カラー点群を簡単に作成
できます。
Zeb Locate

ZEB Horizonに、高精度な衛星測位システム(GNSSレシーバー)を接続した組合せで、
外部のコントロールポイントを必要とせずに、
点群テータを現実世界に接続します。
Zeb Horizon RT

ZEB Horizonでスキャンしたデータをリアルタイムで確認できるアップグレードバージョン。歩きながらプレビューを見ることができるので、データ取得の確実性が飛躍的に向上します。
GeoSLAM Draw ソフトウェア
GeoSLAM Drawは、様々な形式でデータをCAD等へエクスポートしたり、2次元に変換して図面(間取り図等)を作成または数値を計測したり、メッシュDTM(メッシュ化された3Dデジタル地形モデル)を抽出したり、 スキャンしたデータをジオリファレンスすることができるソフトウェアです。
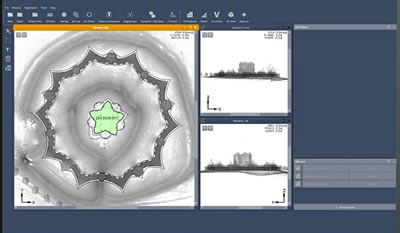
GeoSLAM Drawソフトウェア概略(Draw Basic)
・ E57、Las/Laz、Ply、Xyz形式の点群のエクスポート
・インポート機能
・平面、正面図、側面図作成
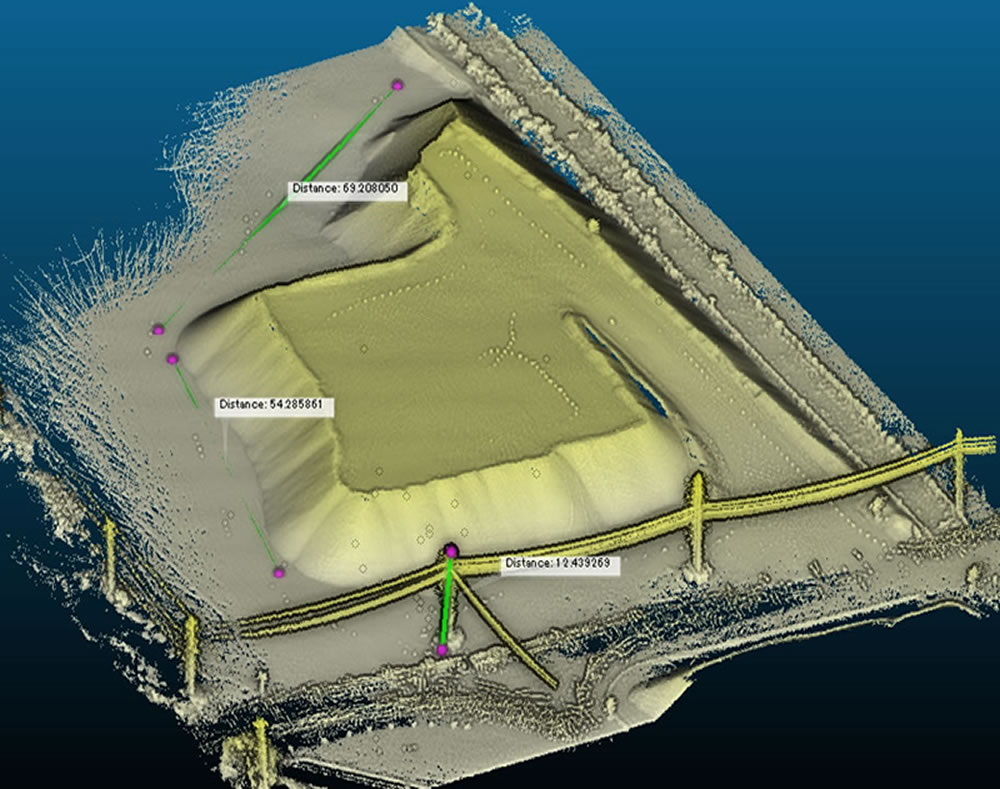
・距離計算
・平面図面自動作成及びベクトル化
・整列、地理参照データ
GeoSLAM Drawソフトウェア概略(Draw Pro)
機能アップグレードライセンスにより下記の機能を追加できます
・他社のスキャナーデータのインポート
・スタティックスキャンデータの登録
・Webあるいは3D Pdfにエクスポート
・地形の横断面(プロファイル)作成
・スラグの山やぼた山の体積計算
・メッシュDTMの作成
・表面変化測定(デフォルメーション)
・4CADインターフェイス(CADあるいはBIMパッケージとの連携)
作成例
作成例①:
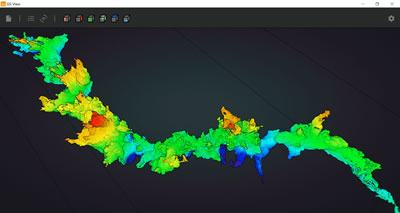
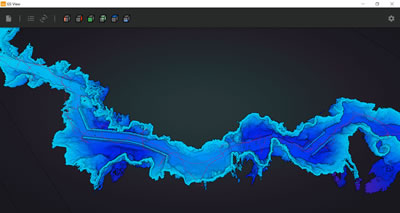
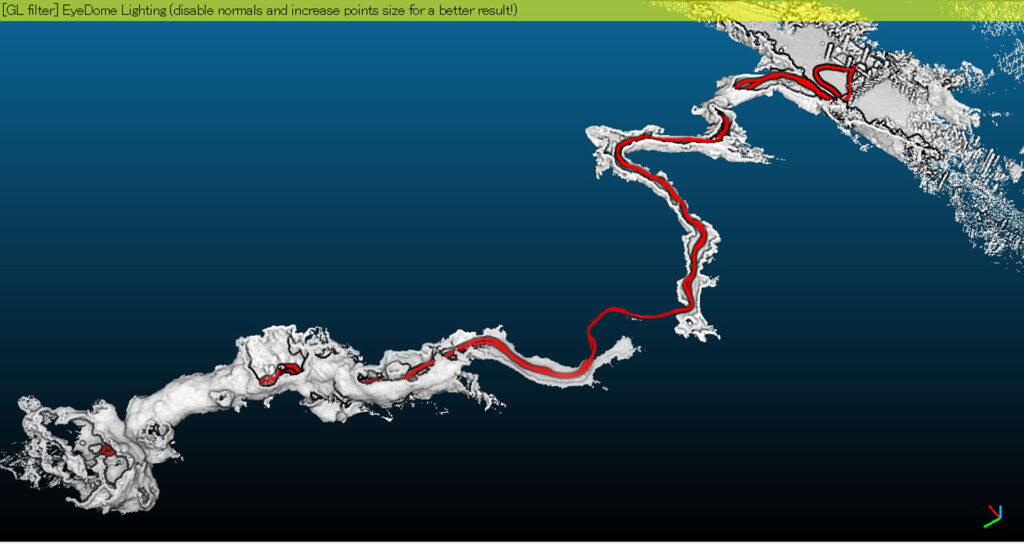
奥行き約350mの九州の鍾乳洞調査にZEB-HORIZONを使用。
これまで同鍾乳洞では、固定式レーザーで鍾乳洞内部の3次元形状調査を行っていましたが、内部の広い空洞では可能ですが狭い箇所や複雑に入り組んだ場所での三脚固定式レーザー撮影は物理的に不可能でした。
また、洞窟外側から測量をし、順次内部の測量に持って行く方法を取っていたため、全体の作業日数は数か月に及ぶこともありました。
一方、SLAM方式のレーザーマッピング方式では、細かな個所も含め半日の現地作業で奥行約350mの鍾乳洞内調査を完了。
驚くほど短時間で、且つ複雑な形状のスキャン作業を終えることができました。


下記3枚の点群画像(9%の粗い点群)は鍾乳洞全体の約3分の1のスキャン画像。 左端の画像は鍾乳洞入り口付近の3次元点群、他2枚は内部が見えるように上部をスライスした3次元点群、右端の画像の赤色の線はスキャナーのトラジェクトリ(移動経路)。
作成例②:
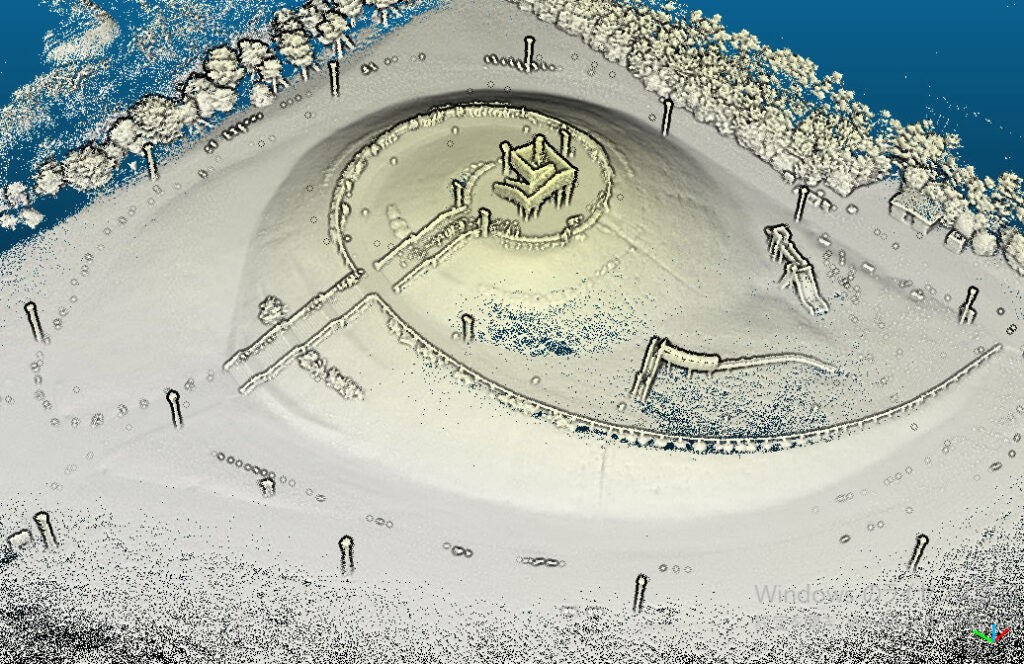
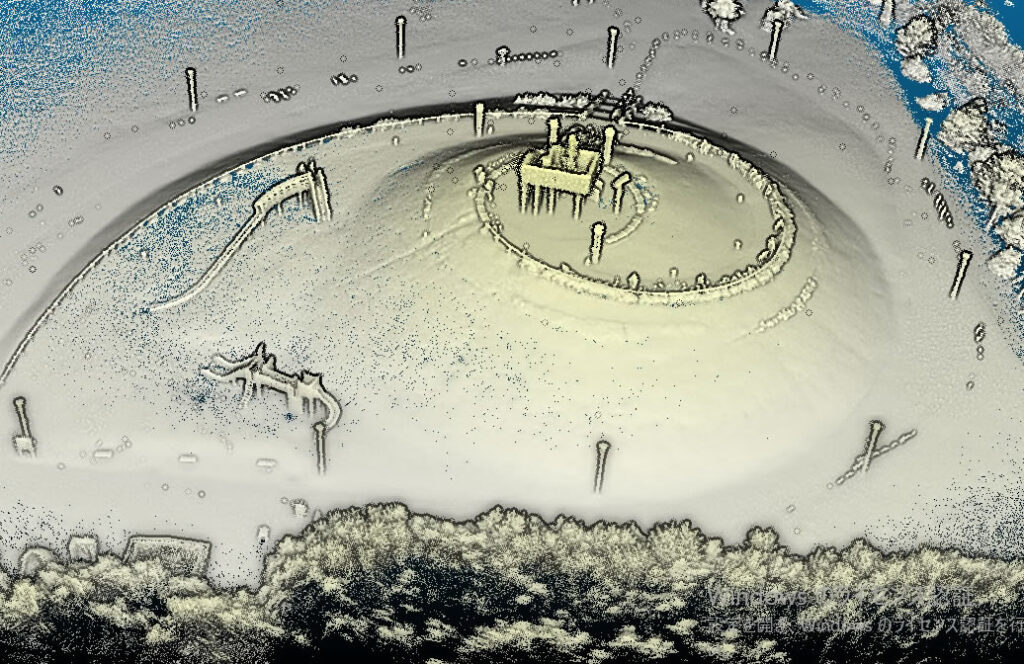
千葉県にある高洲海浜公園に小高い丘があります。その丘の写真とZEB Horizonで作成した3次元点群です。
2段目の3枚の画像は色付き点群のプレビュー画像。デジタルビデオ搭載のZEB Horizonで作成。

作成例③:
某鉱山のストックヤードに積み上げられたスラグの山の3次元点群作成例です。

| レーザーセンサー | Velodyne VLP-16、16個のレーザー送受信センサ内蔵(Class 1 Eye Safe) |
| スキャン範囲 | 0.5m ~ 100m(計測最適距離:50m以内) |
| 防塵・防水規格 | IP54 |
| ZEB-CAMの画角 | 130° |
| データロガーで使用のHDD | 100GB SSD。残存容量が30GBになると最初のファイルデータは上書きされます。 |
| スキャナーの重量 | 1.3kg |
| スキャンポイント/秒 | 300,000ポイント/秒 |
| センサー数 | 16センサー |
| ドローンへの搭載 | UAVマウントを使用しMatrice300、Matrice600に搭載可能 |
| 相対精度 | 6mm 以下 |
| バッテリー使用時間 | 最長3.5時間、但し一回のスキャニング操作は30分以内を推奨。 |