点群データをリアルタイムで表示

本製品は製造終了となりました。今後は在庫分のみの販売となります。詳細はお問い
合わせください。
本製品の後継機種はOrbisとなります。
- カテゴリ
- 3Dマッピング
- 業界
- 土木 測量 防災
- メーカー
- GeoSLAM
GPSを使用しない3次元モバイルマッピングテクノロジー GeoSLAM “ZEB-REVO RT”
本製品は製造終了となりました。今後は在庫分のみの販売となります。
詳細はお問い合わせください。
本製品の後継機種はOrbisとなります。
どこにでも持ち運び可能で、GPSを使用しない3次元モバイルマッピング
テクノロジー。
高精度 ZEB-REVO RTハンドヘルド3Dスキャナーは、様々な産業に最適
です。
正確な3D測定が必要な場所ならZEB-REVO RTがお手伝いします。
ポータブルな3Dスキャナーは狭い空間、物体のスキャン、アクセスしに
くい場所、そして地下空間のような場所で、幅広い解決策となります。
あらゆるものをマッピングできる完璧なソリューションです。
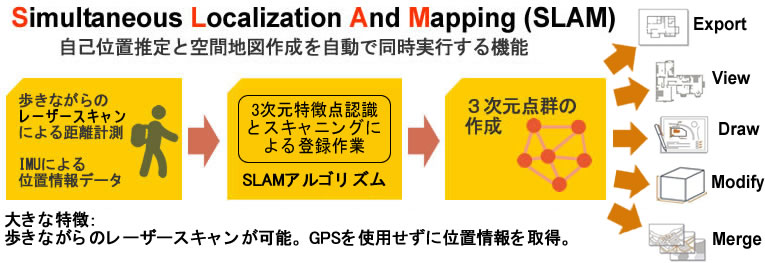
SLAMとはSimultaneous Localisation And Mappingの略で、 自己位置推定と空間地図作成を自動で同時に実行する機能です。


データロガーとWiFi接続されたタブレット上にリアルタイムでスキャニングの軌跡とスキャンした構造物の粗い2次元点群が表示されます。
| 最大測定距離 | スキャンポイント/秒 | 相対精度 | スキャンFOV | 処理 |
|---|---|---|---|---|
| 30m | 43,000ポイント | 6mmまで | 360° x 270° | リアルタイム |
リアルタイムのデータ取得
軽量で使いやすいハンドヘルド型の ZEB REVO RT レーザー スキャナーを使用すると、移動中でも非常に正確な 3D モデルを数分で迅速に構築できます。
製品リスト
GeoSLAMモバイルタイプ3次元レーザースキャナー製品一覧:
| 製品名 | 当社型番 | 説明 |
|---|---|---|
| ZEB-REVO RT | CT-ZEBREVO-RT | ZEB-REVOのRT(Real Time)バージョン。 GPSを使用せずに迅速なモバイルマッピングを行なう為の3次元レーザースキャナーセット。 軽量でハンドヘルドのレーザースキャナー、HDD内蔵のデータロガー(CPU)、バッテリーパック (1個プラス1個スペア)、Zeb-CAM、タブレット、GeoSLAM Hubソフトウエア、各種ケーブル一式、 及び⑥それらを収納するハードケース(⇒画像)から構成されます。 1年間GeoSLAM Careサポート有り。 Note:GeoSLAM DRAWソフトウエアは2020年9月1日の時点で標準構成から外され、別売りとなりました。 |
教育機関向け価格:
| 製品名 | 当社型番 | 説明 |
|---|---|---|
| ZEB-REVO RT(教育機関向け) | CT-ZEBREVO-RT-EDU (教育機関向け) | ZEB-REVOのRT(Real Time)バージョン。 GPSを使用せずに迅速なモバイルマッピングを行なう為の3次元レーザースキャナーセット。 軽量でハンドヘルドのレーザースキャナー、HDD内蔵のデータロガー(CPU)、バッテリーパック (1個プラス1個スペア)、Zeb-CAM、タブレット、GeoSLAM Hubソフトウエア、各種ケーブル一式、及び⑥それらを収納するハードケース(⇒画像)から構成されます。 1年間教育機関ユーザー様向けGeoSLAM Careサポート有り。 Note:GeoSLAM DRAWソフトウエアは2020年9月1日の時点で標準構成から外され、別売りとなりました。 |
オプション:
| 製品名 | 当社型番 | 説明 |
|---|---|---|
| 14.8Vリチウムイオンバッテリー | CT-ZEBREVO-RT-BAT | ZEB-REVO RT用スペアバッテリー。 現時点では航空法の規制の為、本スペアバッテリーは単独で航空便で送ることが出来ないため、 ZEB-REVO RTご購入時に最大2個を本体とご一緒にご購入することをお勧めしています。 |
製品についてのご質問・ご相談、価格見積もりなど、下記フォームよりお気軽にお問合わせください。
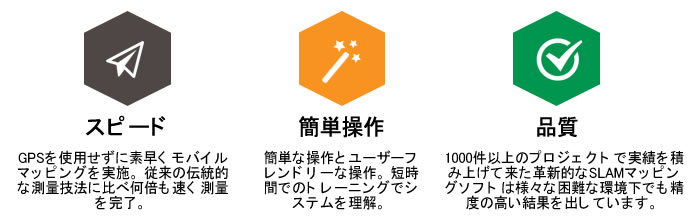
どこにでも持って行ける(go-anywhere)3次元モバイルマッピングの3つの大きな強み。
SLAM とは
ZEB-REVO RTハードウエア・ソフトウエア構成

作業手順
![]() 歩いてスキャニング
歩いてスキャニング
360°の視界をスキャナーから最大30m 範囲(屋内の場合30m。屋外の場合15m 範囲)で、歩き回る事で43,000の計測ポイントをわずか数秒でキャプチャー。
自動SLAM (Simultaneous Localisation And Mapping = 自己位置推定と空間地図作成を自動で同時に実行)処理ソフトウェア「GeoSLAM HUB」が高度に正確な3次元点群を生成します。
また、付属のビデオカメラで取得した動画をレー
ザースキャニングと同期表示させることが出来ます。
![]() 3次元点群表示
3次元点群表示
一旦マップされると、同期された画像と取得した3次元点群データがGeoSLAM HUBソフトウェアに2Dと3Dで表示されます。
大きなプロジェクトの場合は、複数のデータセットをマージすることもできます。
![]() エクスポート
エクスポート
成果物は業界標準フォーマットで使用することができ、ユーザーはサードパーティー製の前処理ソフトウェアとのより良い統合のため、豊富なエクスポートオプションや設定から選択することができます。
「GeoSLAM」のソリューションによって、建物の測量方法が変わります。
トータルステーションやその他の伝統的な測量機器を使用した場合よりも、10倍も早く建築計画を立てることができます。
最新かつ正確な3Dモデルへの需要が過去最高に高まっています。
伝統的に、それらのモデルを作成することはもっぱらプロの測量士の担当でありましたが、しかし現在では、エンジニアや施設管理者や建築家などの地理空間のプロたちは、みな素早く、正確に3Dモデルを作成する方法を探っています。
そのようなプロフェッショナルたちは、簡単に導入・使用が可能で、それでいて頑丈で、素早く正確かつ信用できる、ユーザーフレンドリーな技術を求めています。
建物内や洞窟、鉱山、森林などといった閉鎖空間では、GPS無しに自己の位置を推定し空間情報を取得する要求はさらに大きくなります。
そして多くの場合、空間のマッピングはスピードが重視されます。
屋内にも地下にも、またはアクセスの困難な場所にも使用できて、短時間で高精度な3Dモデルが作成できるような、多目的なツールが求められます。
軽量でハンドヘルドのレーザースキャナーで、機動性が高く、簡単な操作でどなたでも使えます。
我々の多目的技術はどんな環境にも適用可能で、特に複雑で周囲を囲われたスペースのような環境でも問題ありません。
また、GPSへの接続も必要ありません。
ZEB-REVO測量システムにはスキャナー、データロガー、アクセサリーが含まれており、移動中に正確にスキャンしてデータを収集することができます。
ユーザーフレンドリーなデスクトップソフトウェアを使用することで、データをリアルタイム3D情報に変換し、素早く正確な結果を数分で得ることができます。
無制限の点群処理ソフトウェアとローカルレジストレーションにより、測量データをその場で即座に確認し、ファイルを業界標準の範囲のフォーマットでエクスポートすることができます。
ZEB-REVOを使用してのデータのキャプチャは「歩いてスキャン」というシンプルなものです。
3階建てのビルを±15mmの精度で、わずか30分でマッピングし、または1時間以内で10,000 ㎡ を表示・エクスポートをすることができます。
従来の伝統的なツールを使用するよりも10倍も早く建設計画を計測することができ、BIMモデルを考えている以上に素早く作成し、プロジェクトにかかる費用は最大3分の2削減することが可能です。
また、従来のツールが使用できなかったり、時間がかかりすぎるプロジェクトに私たちのソリューションを使用すれば、お客様のサービスの範囲を広げることも可能です。
どこでも3Dモバイルマッピング
我々の多目的技術は全ての業界でどのような環境においても適用することができ、特に複雑で囲われた空間で、GPSなしで使用することができます。
柔軟なマウント・装着オプションがあり、ハンドヘルドでドローンまたはロボットにマウントしたり、ポールやケーブルにもマウントすることができます。
たったの3.5kgと軽量なハンドヘルド端末ですので、マルチレベルの環境でも素早くスキャンすることができます。
スキャン時間の短さ
ZEB-REVOは誰でもほんの数分で操作することができます。
また、私たちの有能なソフトウェア(業界で最も認められている堅固なSLAMマッピングアルゴリズムを使用しています)では、3階建てのビルを±15mmの精度で、わずか30分でマッピングし、または1時間以下で10,000 m2で表示・エクスポートをすることができます。
測量したい環境を歩くだけで43,000points/secの記録が可能となり、スキャンからフル3D BIMモデルが1時間以下でできます。
省コスト・省時間
キャプチャ及び複雑なモデルデータを10倍も素早く行うことができ、プロジェクトをほとんど中断することなく最少の時間で完了することができます。
従来の調査や静的地上レーザースキャンよりも高速にスキャンする能力が実証されており、スキャン時間を短縮することができます。
また、ZEB-REVOは、屋内でのハンドヘルドスキャンを屋外スキャンと同時に実行でき、既存のスキャニングハードウェアと非常に相補的であるため、プロジェクトにかかる時間とコストを節約できます。
応用分野
・測量
・エンジニアリング
・林業
・施設と資産の管理
・鉱山業
・洞窟調査
・入り組んだ路地の調査
・トンネル調査
応用例
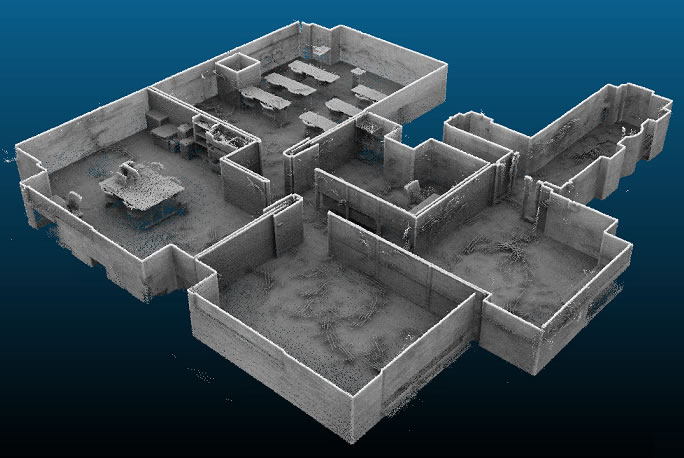
作成例:
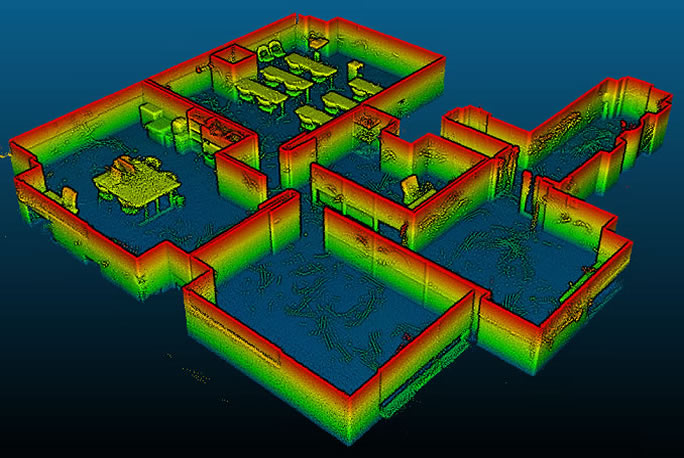
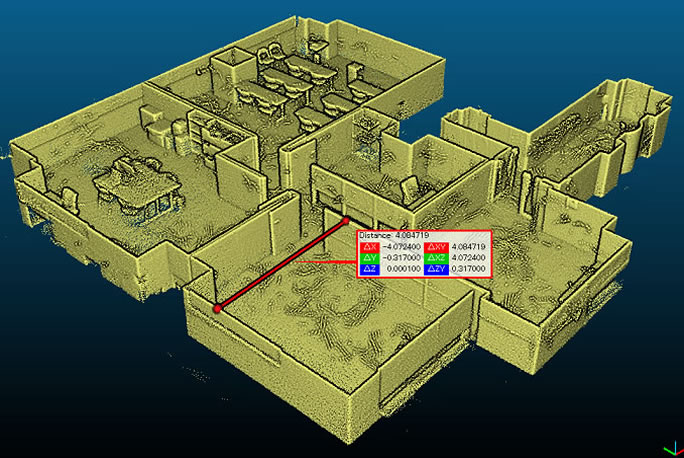
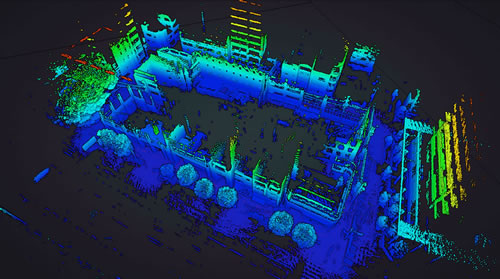
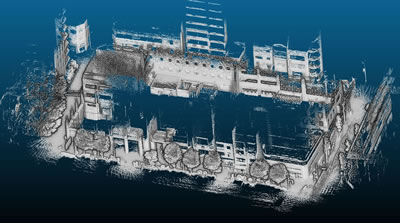
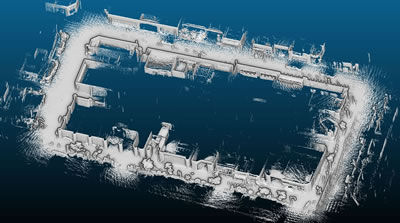
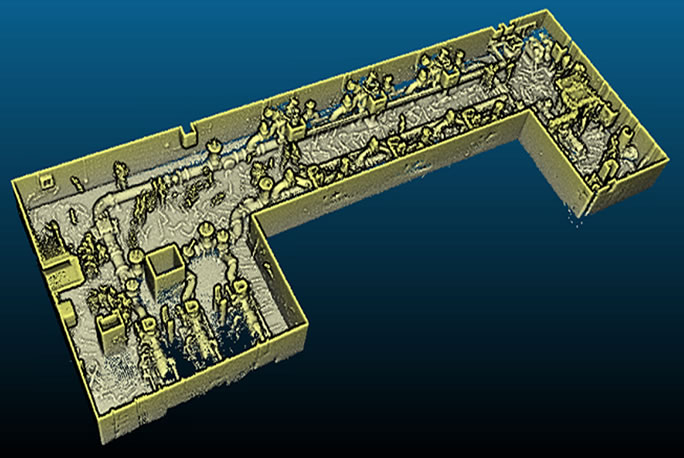
わずか10分足らずの歩きながらのレーザースキャニング操作で某オフィスの内部構造データを把握。GeoSLAMテクノロジーで高精度の3次元点群が作成出来ます。下3点の画像は同一の3次元点群ですが色付けを変えています。
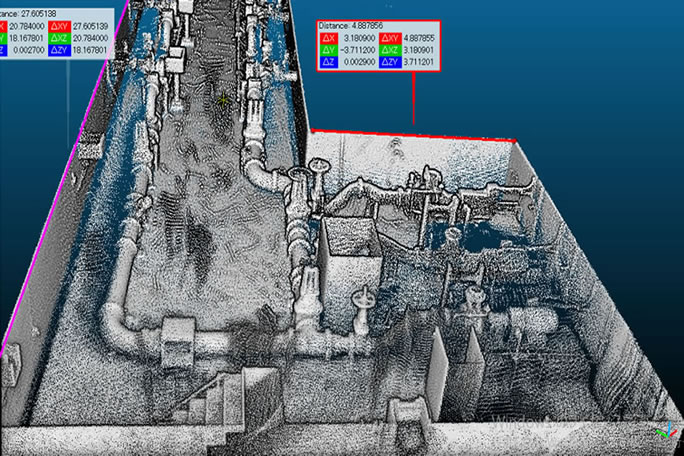
右端画像は点群データ上での距離測定例を示しています。
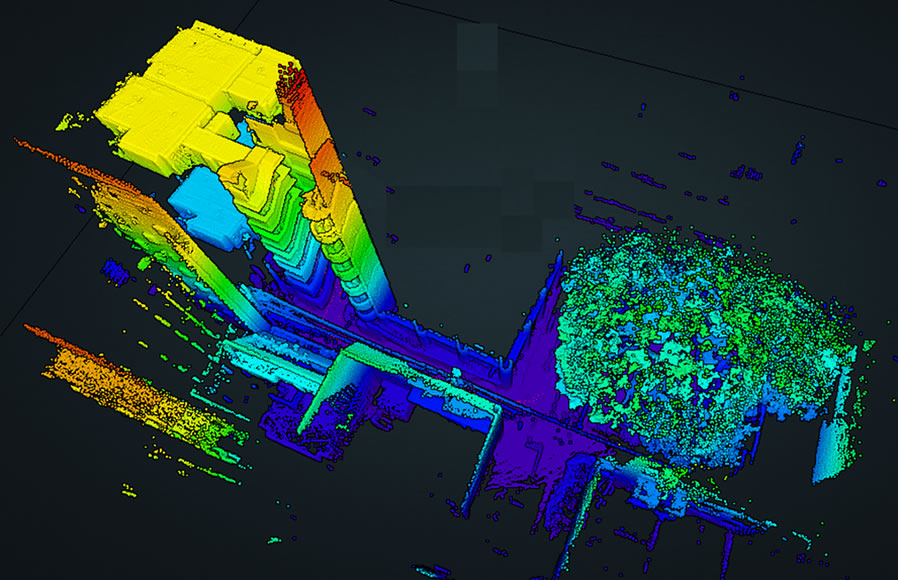
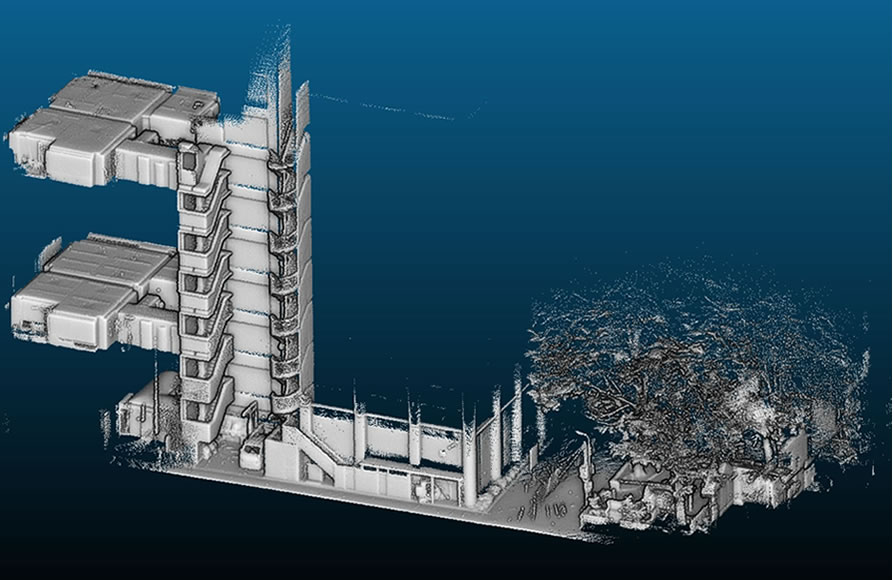
作成例:
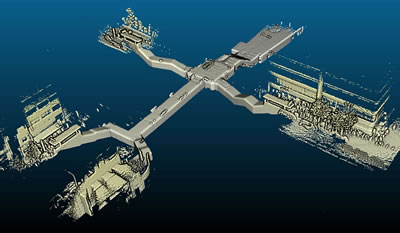
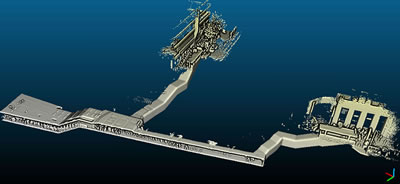
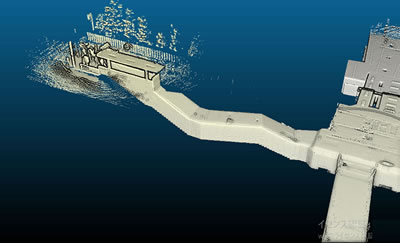
スキャニング経路:ビルの7階→非常階段経由→3階→非常階段経由→1階→外に出て近くの神社→1階から非常階段経由→7階のスタートポイントに戻る。
このような移動経路でビル屋内、ビル屋外非常階段、屋外道路、神社を連続してスキャンした場合の3次元点群を作成。
ビル内のスキャンした場所もカットツールで切り取れば内部点群も見ることが出来ます。

作成例:
中央区日本橋の市街地の一区画を歩きながらのスキャニング。
作成例:
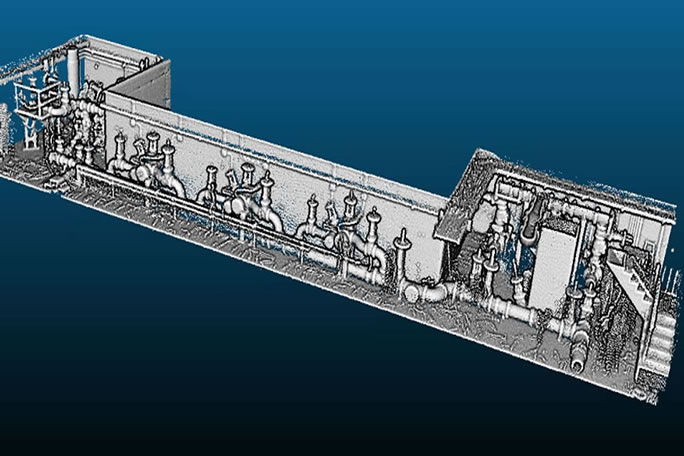
某施設の中にある機械室。
パイプや機器が並んでいる場所をZEB-REVO RTで約20分ほどでスキャンニング実施。
パイプ類や機器類の形状や配置が非常にはっきりと表示されており、空間の距離も高い精度で測定可能。
作成例:
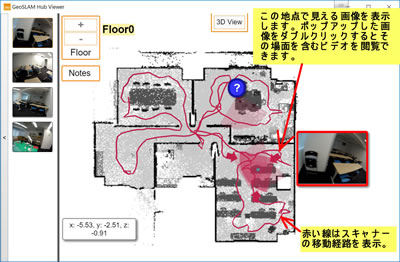
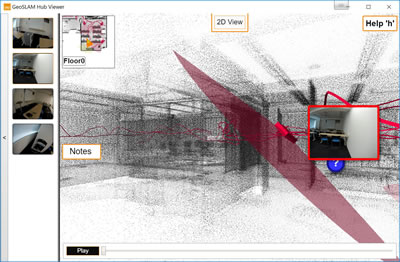
ZEB-REVO RTには、スキャン中に前方に見える風景や対象物のビデオ録画の為に使用する小型のビデオカメラをハンドヘルドスキャナーに装着できます。
GeoSLAM Viewer(GeoSLAMビューワー)上でスキャナーの移動経路が表示され、経路上の任意の箇所をクリックするとそこで撮影された画像およびクリック操作でその画面を含むビデオを閲覧できます。
また、ビデオ映像からの色表示を取り入れた色付き点群も作成出来ます。
なお、色付き点群の色表示はあくまで補助的な役割のため、スキャナーの移動経路のクリックで表示される周辺画像あるいはビデオの閲覧をおすすめします。

作成例:
某地下鉄に通じる地下道の一部の3次元点群です。ZEB-REVO RTを片手に持ちスキャンしながら地下鉄の4か所の入り口を歩きながら撮影。
スキャニングにかかった時間はわずか20分。
技術仕様
| 製品名 | ZEB-REVO RT |
| システム機能: | |
| SLAM登録方式 | Real Time |
| WiFi機能 | 有り |
| 最大レンジ | 屋内:30m、屋外:環境条件に応じて15 m ~ 20 m |
| スキャンレート | 432points/scan line、100scan lines/sec、43,200points/sec |
| スキャンレンジ誤差 | ±30mm |
| 視野角 FOV | 270° x 360° |
| 供給電圧 | 14.8VDC、約5.0A |
| 動作温度 | 0℃ ~ +40℃以上 |
| 動作湿度 | 相対湿度85% 以下 |
| レーザー: | |
| レーザー安全クラス | Class 1 Eye Safe(21 CFR 1040.10及び1040.11準拠) |
| レーザー波長 | 905nm |
| スキャナーライン速度 | 100Hz |
| スキャナ解像度 | 水平:0.625°、垂直:1.8° |
| 回転速度 | 0.5Hz |
| バッテリー: | |
| バッテリータイプ | リチウムイオン |
| 容量 | 6.3Ah、90Wh |
| 定格電圧 | 16.8V |
| 輸送認証 | UN 38.3 輸送試験認証取得 |
| バッテリー重量 | 570g(脱着型) |
| データ: | |
| データロガー内部ストレージ容量 | 120GB |
| 生データファイルサイズ | ~ 10MB/1分スキャニング |
| 処理されたデータファイルサイズ | ~ 8MB/1分スキャニング |
| デフォルトの出力ファイル形式 | LAZ(圧縮LAS) |
| 互換性 | 解凍されたLASデータは主要CADソフトパッケージと互換性があります |
| 精度: | |
| 相対精度 | 1cm ~ 3cm |
| その他: | |
| IPレート | IP51 |
| ケーブルコネクタ | LEMOマルチピン |
| 重量(スキャナ) | 1.0Kg |
| 重量(キャリングケースと本体込み) | 4.1Kg |
| 寸法(スキャナ) | 80 x 113 x 140mm(ハンドルを含めて287mm) |
| 寸法(キャリングケース) | 470 x 220 x 180mm |
| バッテリー連続使用時間 | 最長1.5時間 |